Our center is researching the cutting edge of mobility and robotics
The University of Michigan and Ford Motor Company have partnered to form the UM & Ford Center for Autonomous Vehicles (FCAV) to accelerate autonomous vehicle research and explore the future of driving through safer and more capable vehicles. We are researching perception, control, and planning for level-4 self-driving cars.
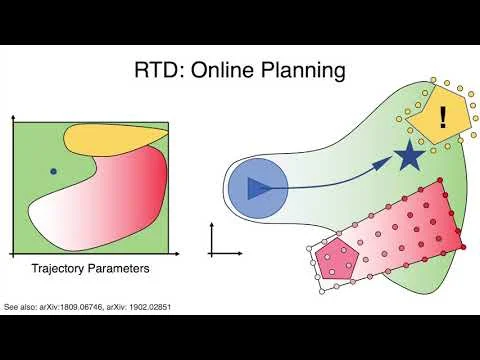
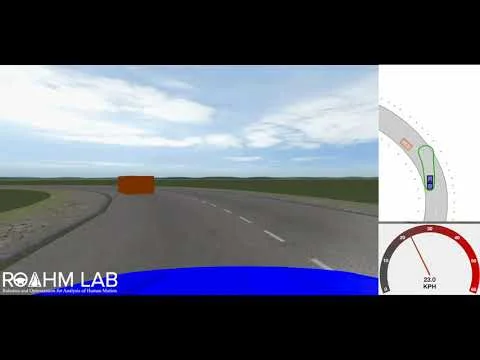
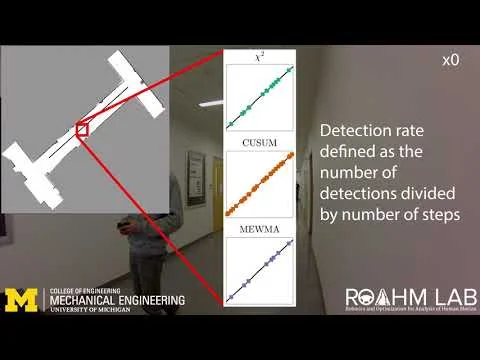
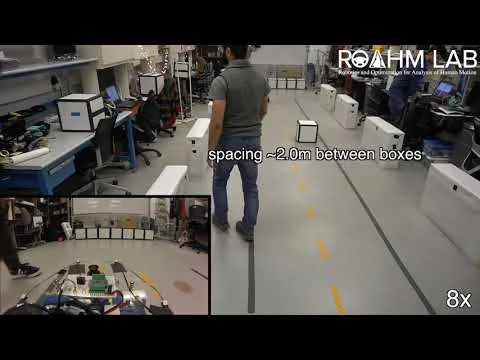
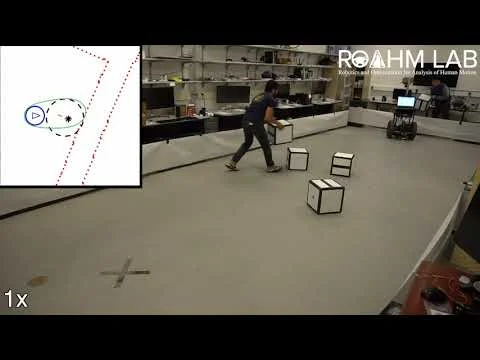
Research Videos