Occlusion-Aware Risk Assessment and Planning
DESCRIPTION
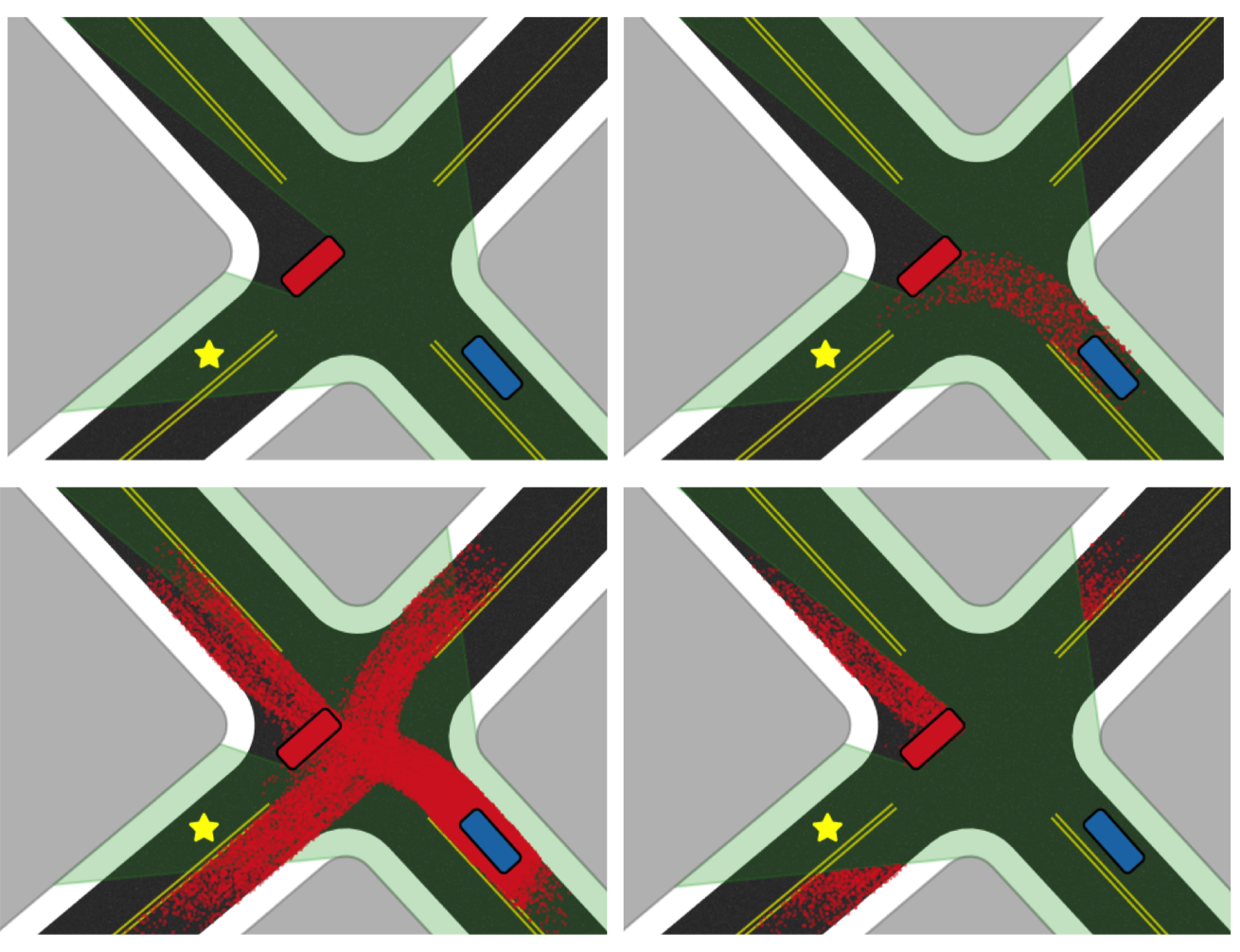
Risk assessment to quantify the danger associated with taking a certain action is critical to navigating safely through crowded urban environments during autonomous driving. Risk assessment and subsequent planning is usually done by first tracking and predicting trajectories of other agents, such as vehicles and pedestrians, and then choosing an action to avoid future collisions. However, few existing risk assessment algorithms handle occlusion and other sensory limitations effectively. One either assesses the risk in the worst-case scenario and thus makes the ego vehicle overly conservative, or predicts as many hidden agents as possible and thus makes the computation intensive. This work explores the possibility of efficient risk assessment under occlusion via both forward and backward reachability. The proposed algorithm can not only identify the location of risk-inducing factors, but can also be used during motion planning. The proposed method is evaluated on various four-way highly occluded intersections with up to five other vehicles in the scene. Compared with other risk assessment algorithms, the proposed method shows better efficiency, meaning that the ego vehicle reaches the goal at a higher speed. In addition, it also lowers the median collision rate by 7.5× when compared to state of the art techniques.
RELATED Publications
M.-Y. Yu, R. Vasudevan, and M. Johnson-Roberson, "Risk Assessment and Planning with Bidirectional Reachability for Autonomous Driving," IEEE International Conference on Robotics and Automation, 2020, Accepted. [arXiv]
M.-Y. Yu, R. Vasudevan, and M. Johnson-Roberson, "Occlusion-Aware Risk Assessment for Autonomous Driving in Urban Environments," in IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 2235-2241, 2019. [arXiv] [IEEE Xplore] [code] [video]
@article{yu2019risk,
title={Risk Assessment and Planning with Bidirectional Reachability for Autonomous Driving},
author={Yu, Ming-Yuan and Vasudevan, Ram and Johnson-Roberson, Matthew},
journal={arXiv preprint arXiv:1909.08059},
year={2019}
}
@article{yu2019occlusion,
title={Occlusion-aware risk assessment for autonomous driving in urban environments},
author={Yu, Ming-Yuan and Vasudevan, Ram and Johnson-Roberson, Matthew},
journal={IEEE Robotics and Automation Letters},
volume={4},
number={2},
pages={2235--2241},
year={2019},
publisher={IEEE}
}